Τον Ιούλιο, ένα βίντεο ενός ρομποτικού σκύλου οπλισμένο με ένα υποπολυβόλο δεμένο στην πλάτη του, τρομοκρατούσε το διαδίκτυο.
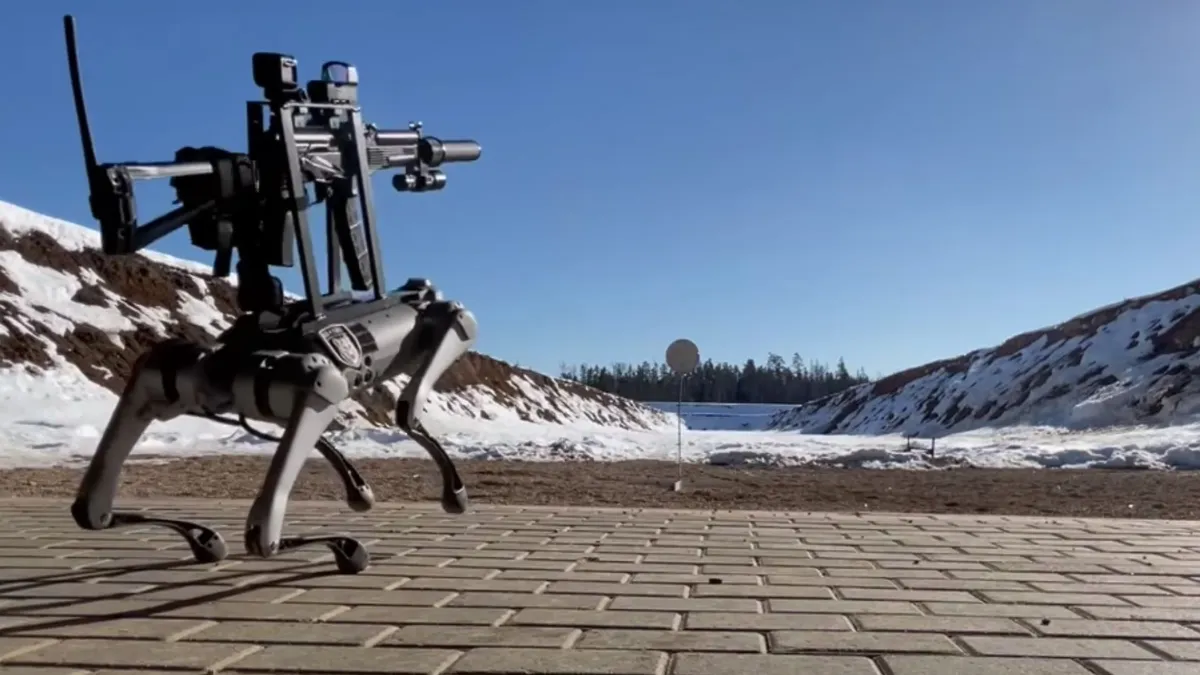
Τώρα ένας hacker που δημοσιεύει στο Twitter σαν KF@d0tslash και στο GitHub σαν MAVProxyUser, ανακάλυψε ότι το ρομπότ περιέχει ένα kill switch. “Καλα νέα!” αναφέρει ο d0tslash στο Twitter.
Good news! Remember that robot dog you saw with a gun!? It was made by @UnitreeRobotics. Seems all you need to dump it in the dirt is @flipper_zero. The PDB has a 433mhz backdoor. No need for @gnuradio! https://t.co/xjDepcGYe2 cc/ @UnitreeRobot007 @IrvingRobotics @shunweicapital pic.twitter.com/6PJHjcsgJL
— KF (@d0tslash) August 4, 2022
“Θυμάστε αυτό το σκυλί ρομπότ με το όπλο!; Κατασκευάστηκε από την @UnitreeRobotic. Όπως φαίνεται το μόνο που χρειάζεστε για να το πετάξετε κάτω είναι το @flipper_zero. Το PDB έχει ένα backdoor στα 433mhz.”
Σε ένα βίντεο, ο d0tslash έδειξε ένα από τα σκυλιά ρομπότ της Unitree συνδεδεμένο σε ένα τροφοδοτικό. Μια hacking συσκευή πολυεργαλείων Flipper Zero, τύπου Tamagotchi, η οποία μπορεί να στέλνει και να λαμβάνει ασύρματα σήματα σε RFID, Bluetooth, NFC και άλλες ζώνες μπορεί με ένα κουμπί να εξοντώσει τον σκύλος ρομπότ και να τον ρίξει στο έδαφος.
Ο d0tslash είχε στα χέρια του ένα από τα σκυλιά και άρχισε να εξετάζει την τεκμηρίωση όταν ανακάλυψε κάτι πολύ ενδιαφέρον. Κάθε σκύλος διαθέτει ένα kill switch για απομακρυσμένη διακοπή λειτουργίας. Ο διακόπτης είναι συνδεδεμένος με τον πίνακα διανομής ρεύματος, που διοχετεύει την ισχύ από την μπαταρία στα διάφορα συστήματά του.
Το kill switch ακούει ένα συγκεκριμένο σήμα στα 433mhz. Εάν ακούσει το σήμα, σταματάει την λειτουργία του ρομπότ. Μερικά από τα σκυλιά ρομπότ της Unitree κυκλοφορούν ακόμη και με ένα ασύρματο τηλεχειριστήριο που σταματάει την λειτουργία της μηχανής.
Ο d0tslash χρησιμοποίησε το Flipper Zero για να μιμηθεί τον τερματισμό λειτουργίας, αντιγράφοντας το σήμα που λαμβάνει το ρομπότ στη συχνότητα των 433 MHz.
Οποιοσδήποτε διαθέτει Flipper Zero ή κάποια παρόμοια συσκευή μπορεί να σταματήσει αυτά τα σκυλιά ρομπότ, Για περισσότερες λεπτομέρειες διαβάστε στο Github.
